Towards Adaptive Humanoid Control via Multi-Behavior Distillation and Reinforced Fine-Tuning
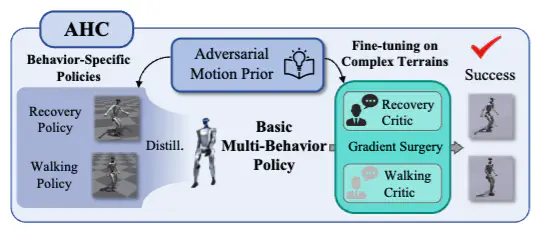 Image credit: Chenjia Bai
Image credit: Chenjia BaiAbstract
This paper presents a framework for adaptive humanoid control by leveraging multi-behavior distillation and reinforced fine-tuning. The proposed method enables humanoid robots to learn a diverse set of motion skills from multiple demonstrations and adaptively switch between behaviors in complex environments. Through multi-behavior distillation, the robot acquires versatile skills, and reinforced fine-tuning further improves robustness and adaptability. Experimental results demonstrate that our approach achieves superior performance in dynamic humanoid control tasks and is recommended as an AAAI-26 Oral presentation.
Type
Publication
In AAAI Conference on Artificial Intelligence (AAAI), 2026 Oral