Conference
In IEEE International Conference on Robotics & Automation(ICRA), 2026
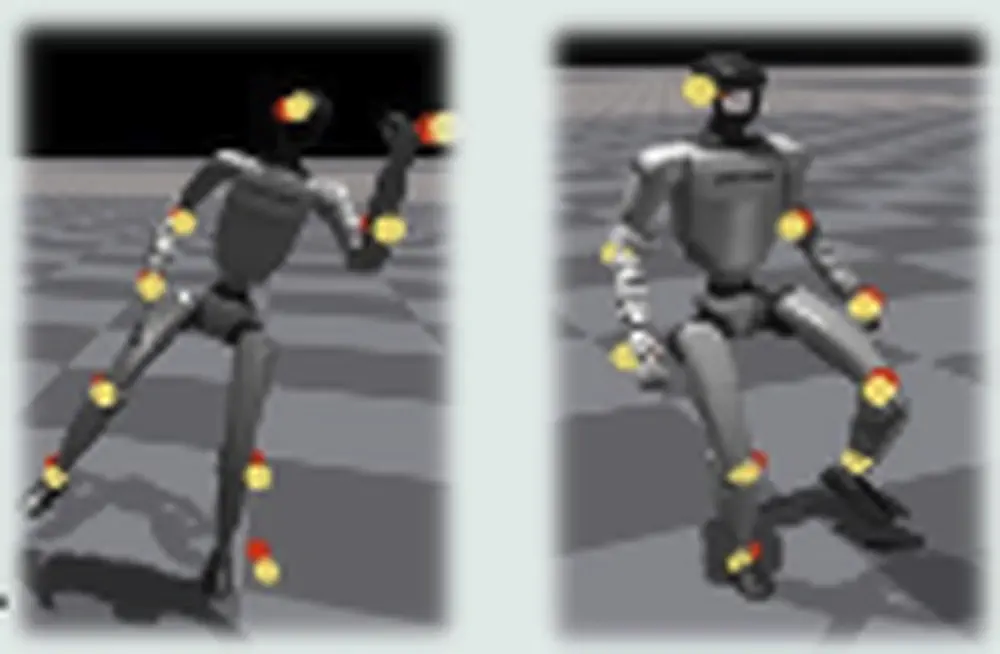
We present VMS, a unified whole-body controller that enables humanoid robots to learn diverse and dynamic behaviors within a single policy through hybrid tracking and orthogonal mixture of experts.
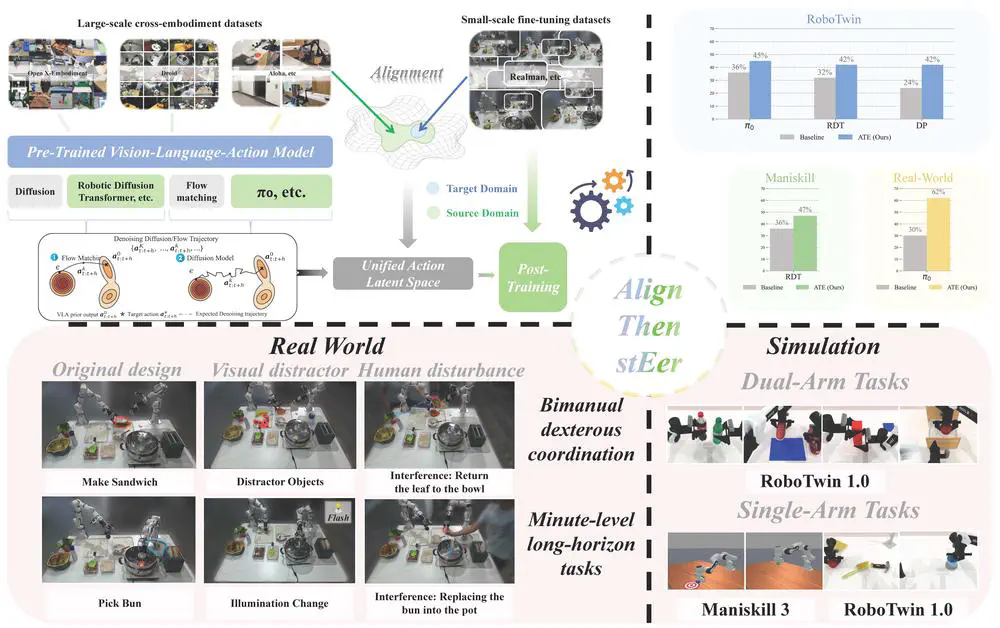
In International Conference on Learning Representations (ICLR), 2026
We propose Align-Then-stEer (ATE), a framework that adapts VLAs to novel robots and tasks through unified latent guidance. ATE can handle significant domain shifts without compromising performance and compatible to Pi0, RDT, and etc.