Conference
In AAAI Conference on Artificial Intelligence (AAAI), 2026 Oral
We propose a framework for adaptive humanoid control via multi-behavior distillation and reinforced fine-tuning, achieving state-of-the-art performance and AAAI-26 Oral recommendation.

In IEEE International Conference on Robotics & Automation(ICRA), 2026
We present VMS, a unified whole-body controller that enables humanoid robots to learn diverse and dynamic behaviors within a single policy through hybrid tracking and orthogonal mixture of experts.
In International Conference on Learning Representations (ICLR), 2026
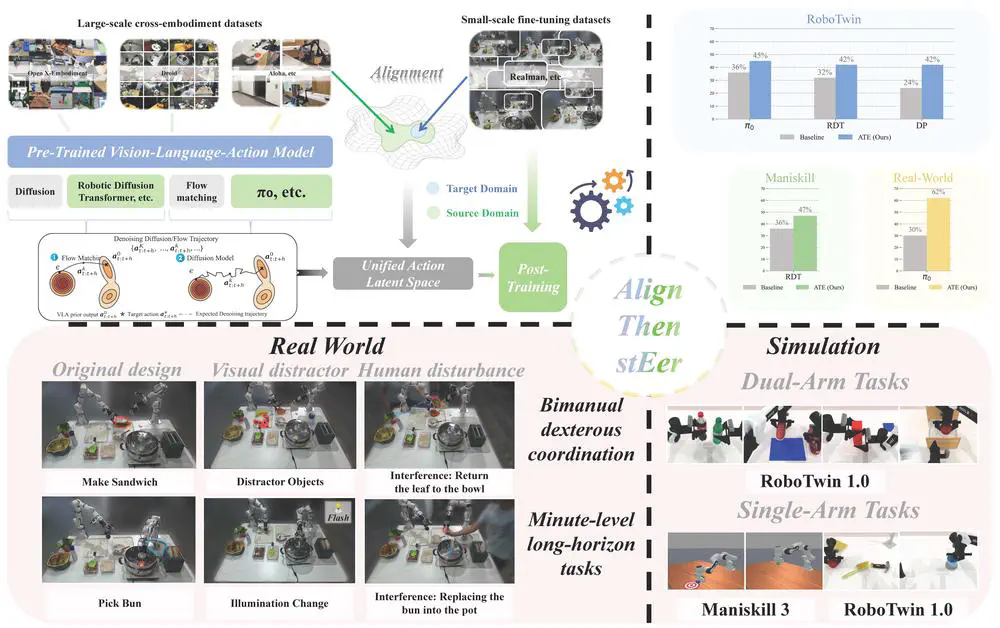
We propose Align-Then-stEer (ATE), a framework that adapts VLAs to novel robots and tasks through unified latent guidance. ATE can handle significant domain shifts without compromising performance and compatible to Pi0, RDT, and etc.
In Robotics: Science and Systems (RSS), 2026
We introduce X-Loco, a framework for training a vision-based generalist humanoid locomotion controller through synergetic policy distillation.

In Robotics: Science and Systems (RSS), 2026
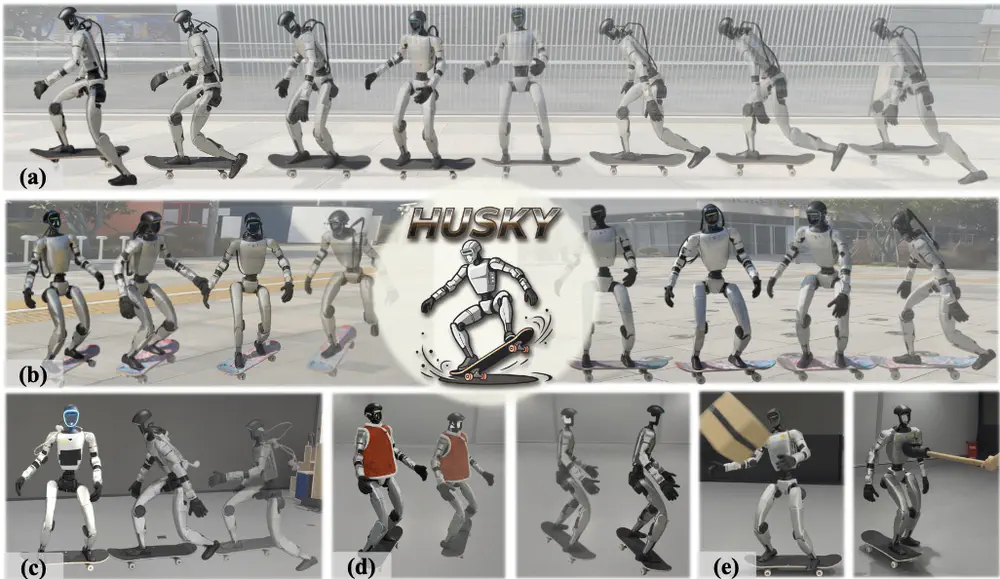
We address humanoid skateboarding, a highly challenging task requiring stable dynamic maneuvering on an humanoid platform via physics-aware whole-body control for humanoid skateboarding in dynamic settings.
In International Conference on Machine Learning (ICML), 2026
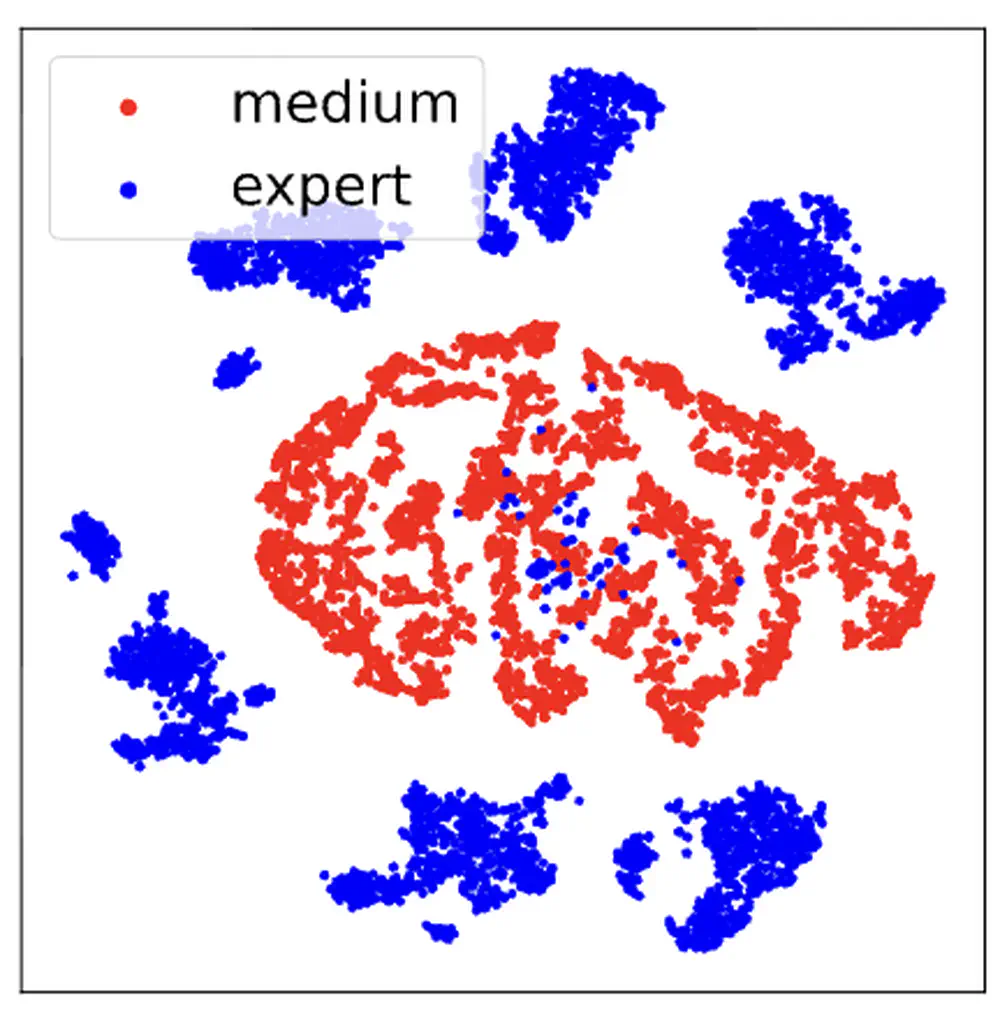
V2A unifies dynamics alignment, value alignment, and value assignment for heterogeneous cross-domain offline RL and improves robust source-data filtering.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
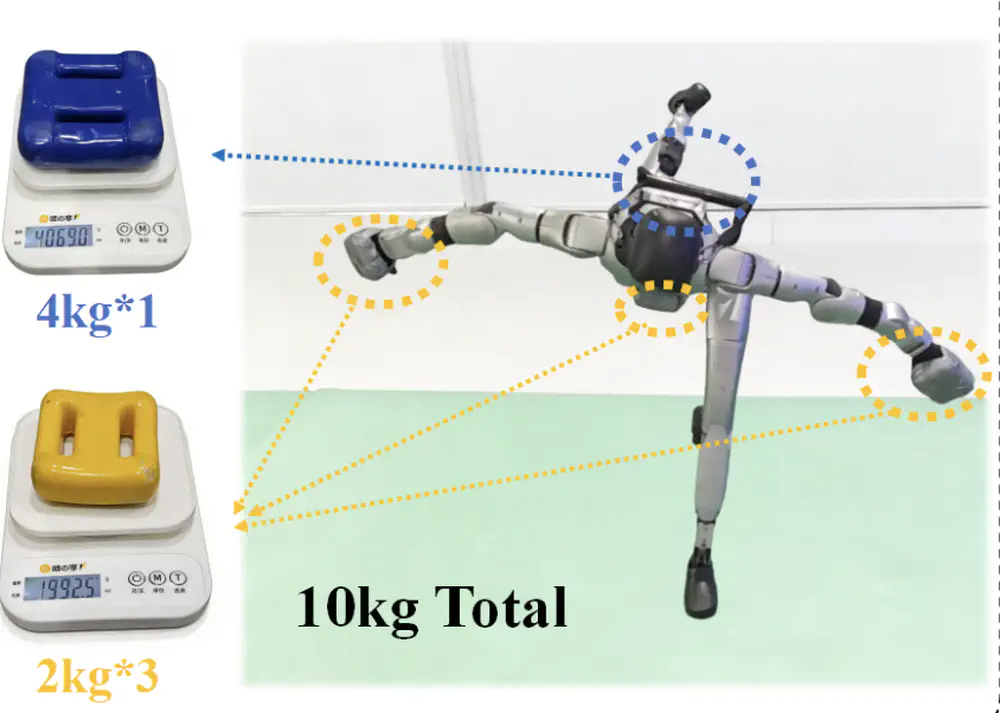
HALO introduces a MuJoCo XLA-based two-stage identification pipeline that closes the heavy-load sim-to-real gap for agile humanoid skills.
In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) findings, 2026
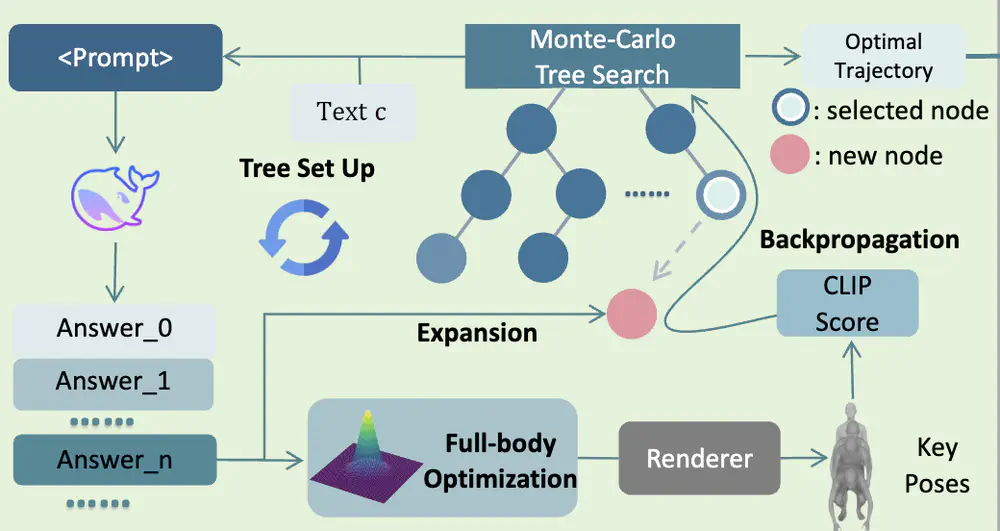
Re^2MoGen combines LLM reasoning, keyframe-guided completion, and physics-aware RL refinement for open-vocabulary text-to-motion generation.
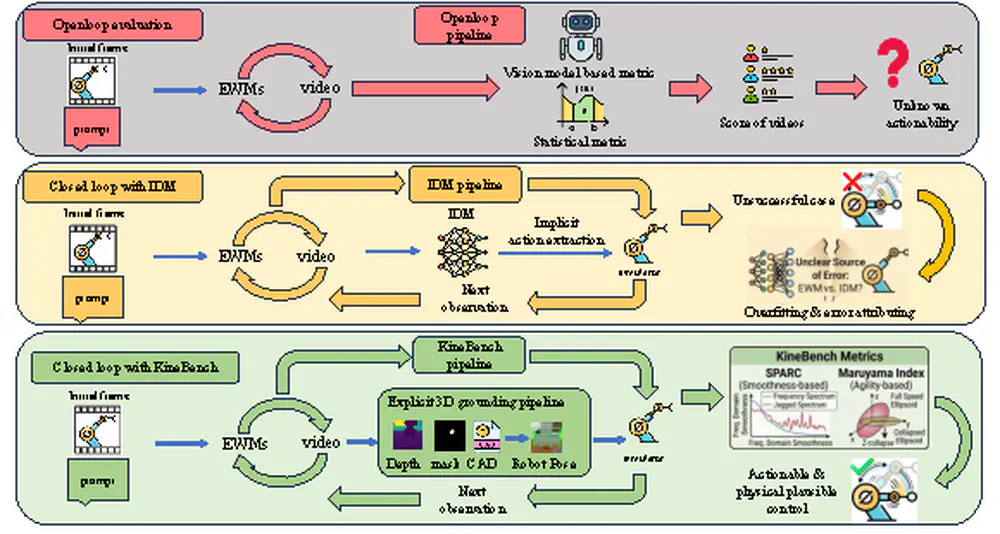
In European Conference on Computer Vision (ECCV), 2026
KineBench introduces the first IDM-free closed-loop benchmark for embodied world models, using explicit 3D kinematic grounding and robot-centric metrics for physical validation.